
Démonstration de cybersécurité et de robotique à l’EIP du lycée Louis Thuillier
📅 Date : mercredi 10 décembre
📍 Lieu : EIP – PIXEM, lycée Louis Thuillier
👥 Organisateurs : Clément Galetta et Marc Brissot



Le lycée Louis Thuillier a accueilli une classe de seconde du lycée Branly dans le cadre de la semaine de la spécialité NSI.
L’objectif de cette demi-journée était de faire découvrir concrètement les métiers de l’ingénierie, à travers deux domaines particulièrement porteurs :
la cybersécurité et la robotique.
- Comprendre comment circule l’information numérique
- Découvrir les risques liés à la sécurité informatique
- Illustrer l’usage de l’algorithmique en robotique
- Donner envie de poursuivre vers des études scientifiques
Deux activités ont été proposées au sein de l’
EIP – Espace d’Innovation Partagé PIXEM :
- Sensibilisation à la cybersécurité
- Résolution d’un labyrinthe par un bras robotisé
🔐 1. Sensibilisation à la cybersécurité : de l’électronique au réseau
Cette première activité visait à montrer que les systèmes numériques reposent sur une chaîne technique complexe, allant du signal électrique jusqu’aux applications réseau.
Une donnée numérique traverse plusieurs couches successives avant d’être lisible par l’utilisateur.
Un microcontrôleur RP2040 exécute un firmware de type USB sniffer.
Connecté passivement aux lignes USB d’un clavier, il capture les trames USB (Low Speed et Full Speed) sans perturber la communication.
Le firmware se contente de transmettre les données brutes via une interface série virtuelle (VCP),
illustrant la séparation entre :
- l’acquisition matérielle
- le décodage logiciel

Une Raspberry Pi interprète ensuite ces données grâce à un programme Python implémentant le protocole USB HID, afin de reconstituer les frappes clavier.
Connectée au réseau local, la Raspberry Pi permet aux élèves de se connecter en SSH
et d’observer en direct le résultat du décodage.
si les communications ne sont pas correctement sécurisées.
Les élèves découvrent ainsi les notions de protocoles, d’architecture en couches,
de systèmes d’exploitation et de réseaux, au cœur du programme de NSI.
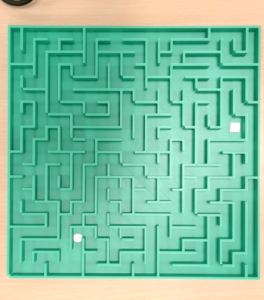
🤖 2. Robotique : résolution d’un labyrinthe par un bras robotisé
La seconde activité s’appuyait sur le bras robotique UFACTORY xArm 5 Lite, installé dans l’EIP.
Le défi proposé était simple en apparence : faire résoudre au robot un labyrinthe imprimé en 3D, en suivant la trajectoire correcte.
- Génération aléatoire par Python
- Modélisation avec OpenSCAD
- Impression 3D sur Bambulab X1 Carbon
- Couleurs contrastées pour la vision par ordinateur
Une caméra surplombant le labyrinthe permet de capturer une image, traitée ensuite par un programme Python.
Le traitement d’image comprend notamment :
- détection des murs verts
- binarisation de l’image
- extraction automatique du labyrinthe
- conversion en grille logique
Un algorithme de parcours en largeur (BFS) calcule alors le plus court chemin entre l’entrée et la sortie.
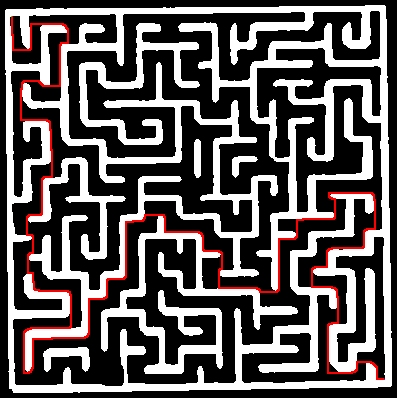
Ce chemin est transformé en coordonnées réelles, puis transmis au robot via un second script Python communiquant avec le bras robotique par réseau IP.
- algorithmique (BFS)
- vision par ordinateur
- robotique industrielle
- liaison logiciel / matériel
🎓 Découverte de la classe préparatoire TSI
Cette demi-journée a également permis de présenter la classe préparatoire TSI, accessible après un baccalauréat STI2D.
Un baccalauréat technologique peut mener à des études longues, des grandes écoles et des carrières ambitieuses dans la recherche comme dans l’industrie.
La prépa TSI ouvre l’accès à de nombreuses écoles d’ingénieurs
et à des domaines variés :
- informatique
- robotique
- électronique
- énergie
- automatique
Un grand merci à Cédric Depoilly pour l’organisation de l’événement du côté du lycée Branly, ainsi qu’à l’ensemble des participants pour leur curiosité et leur implication !